Cinemática directa de manipuladores seriales
MT3005 - Robótica 1

¿Por qué?
Para el manipulador serial más simple, tratemos de combinar las herramientas de cinemática de cuerpos rígidos con las nociones de mecanismos, configuración y espacio de tarea
¿Cuál es la posición del efector final?

¿Cuál es la posición del efector final?
x=a\cos(\theta)
y=a\sin(\theta)
posición en función del ángulo
¿Cuál es la posición del efector final?
x=a\cos(\theta)
y=a\sin(\theta)
posición en función del ángulo
¿Qué es lo que pasa realmente?

efector final
base
espacio de configuración
\mathbf{q}=q=\theta \in\mathbb{R} \subset \mathcal{S}^1
(x,y)\in\mathbb{R}^2
espacio de tarea
efector final
base
\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
=

\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
=\mathbf{T}_{r_z}(q)
\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
=\mathbf{T}_{r_z}(q)\mathbf{T}_x(a)
pose del efector final como función de la configuración
{^B}\mathbf{T}_E(q)=\begin{bmatrix} \cos(q) & -\sin(q) & 0 & 0 \\ \sin(q) & \cos(q) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & a \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
{^B}\mathbf{T}_E(q)=\begin{bmatrix} \cos(q) & -\sin(q) & 0 & a\cos(q) \\ \sin(q) & \cos(q) & 0 & a\sin(q) \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
{^B}\mathbf{T}_E(q)=\begin{bmatrix} \cos(q) & -\sin(q) & 0 & a\cos(q) \\ \sin(q) & \cos(q) & 0 & a\sin(q) \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
posición del efector final con respecto de la base, como función de la configuración
{^B}\mathbf{T}_E(q)=\begin{bmatrix} \cos(q) & -\sin(q) & 0 & a\cos(q) \\ \sin(q) & \cos(q) & 0 & a\sin(q) \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
posición del efector final con respecto de la base, como función de la configuración
mapeo entre \(\mathcal{C}\) y \(\mathcal{T}\)
\mathcal{K}:\mathcal{C} \to \mathcal{T}
es la cinemática directa del manipulador serial
\mathcal{K}(\mathbf{q})\subseteq {^B}\mathbf{T}_E(\mathbf{q})= \begin{bmatrix} {^B}\mathbf{R}_E(\mathbf{q}) & {^B}\mathbf{o}_E(\mathbf{q}) \\ \mathbf{0}_{1 \times 3} & 1 \end{bmatrix}\in SE(3)
el mapeo
\mathcal{K}:\mathcal{C} \to \mathcal{T}
es la cinemática directa del manipulador serial
\mathcal{K}(\mathbf{q})\subseteq {^B}\mathbf{T}_E(\mathbf{q})= \begin{bmatrix} {^B}\mathbf{R}_E(\mathbf{q}) & {^B}\mathbf{o}_E(\mathbf{q}) \\ \mathbf{0}_{1 \times 3} & 1 \end{bmatrix}\in SE(3)
orientación del efector final
posición del efector final
\mathbf{q}=\begin{bmatrix} q_1 \\ q_2 \end{bmatrix} \in \mathbb{R}^2
\mathcal{T} \sim (x,y) \subset SE(2)
espacio de configuración
espacio de tarea
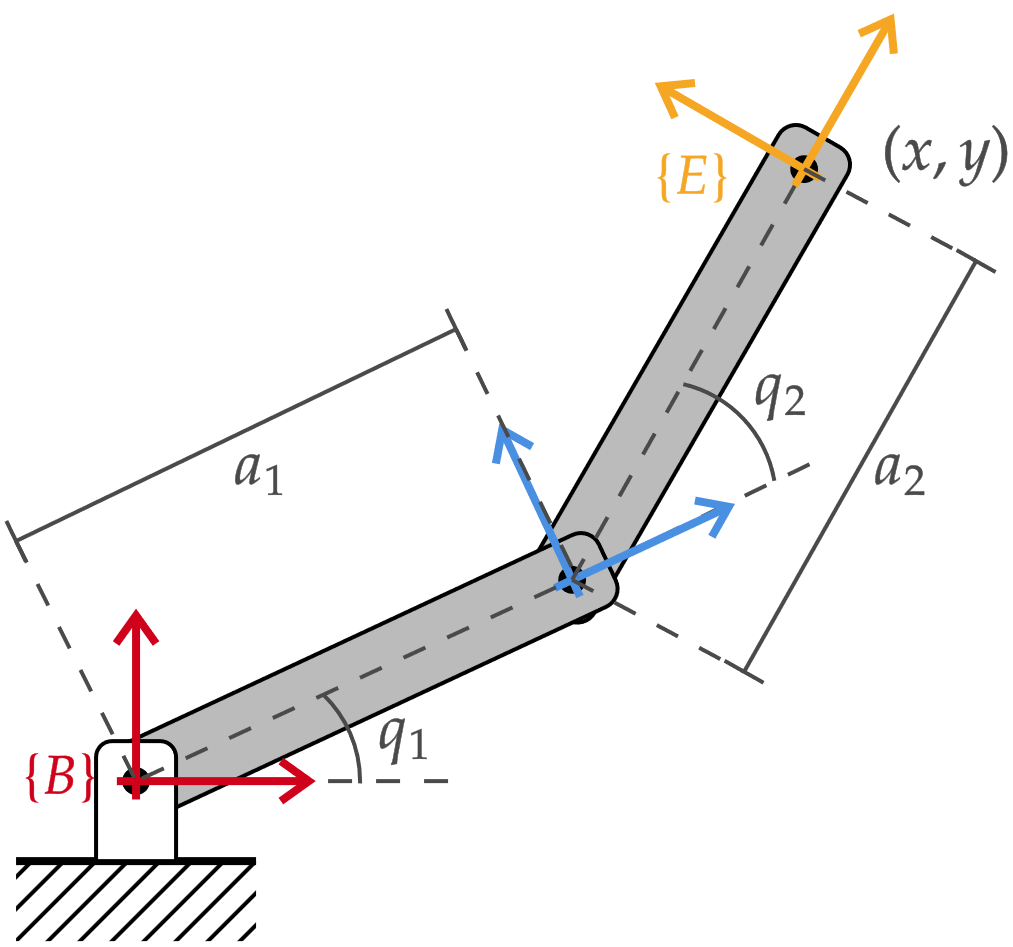
Ejemplo: manipulador planar
Ejemplo: manipulador planar
\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
=
Ejemplo: manipulador planar
\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
=\mathbf{T}_{r_z}(q_1)
Ejemplo: manipulador planar
\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
=\mathbf{T}_{r_z}(q_1)\mathbf{T}_x(a_1)
Ejemplo: manipulador planar
\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
=\mathbf{T}_{r_z}(q_1)\mathbf{T}_x(a_1)\mathbf{T}_{r_z}(q_2)
Ejemplo: manipulador planar
\text{¿}{^B}\mathbf{T}_E\left(\mathbf{q}\right)\text{?}
=\mathbf{T}_{r_z}(q_1)\mathbf{T}_x(a_1)\mathbf{T}_{r_z}(q_2)\mathbf{T}_x(a_2)
{^B}\mathbf{T}_E(\mathbf{q})=
\mathbf{T}_{r_z}(q_1)\mathbf{T}_x(a_1)\mathbf{T}_{r_z}(q_2)\mathbf{T}_x(a_2)
=\begin{bmatrix} \cos(q_1) & -\sin(q_1) & 0 & 0 \\ \sin(q_1) & \cos(q_1) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & a_1 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \cdots \\
\begin{bmatrix} \cos(q_2) & -\sin(q_2) & 0 & 0 \\ \sin(q_2) & \cos(q_2) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & a_2 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
{^B}\mathbf{T}_E(\mathbf{q})=
\mathbf{T}_{r_z}(q_1)\mathbf{T}_x(a_1)\mathbf{T}_{r_z}(q_2)\mathbf{T}_x(a_2)
=\begin{bmatrix} \cos(q_1+q_2) & -\sin(q_1+q_2) & 0 & a_2\cos(q_1+q_2)+a_1\cos(q_1) \\
\sin(q_1+q_2) & \cos(q_1+q_2) & 0 & a_2\sin(q_1+q_2)+a_1\sin(q_1) \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
{^B}\mathbf{T}_E(\mathbf{q})=
\mathbf{T}_{r_z}(q_1)\mathbf{T}_x(a_1)\mathbf{T}_{r_z}(q_2)\mathbf{T}_x(a_2)
\mathcal{K}(\mathbf{q})=\begin{bmatrix} x \\ y \end{bmatrix}=
\begin{bmatrix} a_2\cos(q_1+q_2)+a_1\cos(q_1) \\ a_2\sin(q_1+q_2)+a_1\sin(q_1) \end{bmatrix}
=\begin{bmatrix} \cos(q_1+q_2) & -\sin(q_1+q_2) & 0 & a_2\cos(q_1+q_2)+a_1\cos(q_1) \\
\sin(q_1+q_2) & \cos(q_1+q_2) & 0 & a_2\sin(q_1+q_2)+a_1\sin(q_1) \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
{^B}\mathbf{T}_E(\mathbf{q})=
\mathbf{T}_{r_z}(q_1)\mathbf{T}_x(a_1)\mathbf{T}_{r_z}(q_2)\mathbf{T}_x(a_2)
\({^B}\mathbf{R}_E\) acoplado a \((x,y) \Rightarrow\) 2 DOF insuficientes para obtener cualquier orientación
=\begin{bmatrix} \cos(q_1+q_2) & -\sin(q_1+q_2) & 0 & a_2\cos(q_1+q_2)+a_1\cos(q_1) \\
\sin(q_1+q_2) & \cos(q_1+q_2) & 0 & a_2\sin(q_1+q_2)+a_1\sin(q_1) \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\dim\left(\mathcal{C}\right)=\dim\left(\mathcal{T}\right)
Habilidad del robot vs el espacio de tarea
\dim\left(\mathcal{C}\right)<\dim\left(\mathcal{T}\right)
Habilidad del robot vs el espacio de tarea
\dim\left(\mathcal{C}\right)>\dim\left(\mathcal{T}\right)
robot redundante
Habilidad del robot vs el espacio de tarea

\mathbf{q}=\begin{bmatrix} q_1 & q_2 & q_3 & q_4 \end{bmatrix}^\top \in \mathbb{R}^4
\mathcal{T} \sim (x,y,z) \subset SE(3)
espacio de configuración
espacio de tarea
Ejemplo: robot SCARA
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
etcétera
Ejemplo: robot SCARA
{^B}\mathbf{T}_E(\mathbf{q})=\\
\mathbf{T}_z(a_0)\mathbf{T}_{r_z}(q_1)\mathbf{T}_y(a_1)\\ \mathbf{T}_{r_z}(q_2)\mathbf{T}_y(a_2)\mathbf{T}_{r_z}(q_3)
\mathbf{T}_z(-q_4)
etcétera
¿Cálculos tediosos? MATLAB
>> mt3005_clase5_manipuladores.mlx
de las infinitas formas para llegar a \(\{E\}\) desde \(\{B\}\), ¿Cuál tomamos? ¿Cuál es la mejor?
La convención de Denavit-Hartenberg
de las infinitas formas para llegar a \(\{E\}\) desde \(\{B\}\), ¿Cuál tomamos? ¿Cuál es la mejor?
la convención de Denavit-Hartenberg propone un estándar de transformaciones junta a junta, cada una formada por cuatro transformaciones elementales
La convención de Denavit-Hartenberg

manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
\mathbf{A}_j\equiv^{j-1}\mathbf{T}_j \\
=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
manipulador con
\(n\) juntas
\(n+1\) eslabones
se presentan en forma de tabla
Para llegar de una junta a otra entonces:
- Roto en \(z\) hasta hacer coincidir \(x_{j-1}\) con \(x_j\) en orientación.
- Me traslado en \(z\) hasta que \(x_{j-1}\) y \(x_j\) sean co-lineales.
- Me traslado en \(x\) hasta que coincidan los orígenes de los dos marcos de referencia.
- Roto en \(x\) hasta hacer coincidir \(z_{j-1}\) con \(z_j\).
considera y parametriza sólo dos tipos de junta
Revoluta (R)
\mathbf{A}_j(q_j)=\mathbf{T}_{r_z}(q_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
Prismática (P)
\mathbf{A}_j(q_j)=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(q_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
considera y parametriza sólo dos tipos de junta
Revoluta (R)
\mathbf{A}_j(q_j)=\mathbf{T}_{r_z}(q_j)\mathbf{T}_z(d_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
Prismática (P)
\mathbf{A}_j(q_j)=\mathbf{T}_{r_z}(\theta_j)\mathbf{T}_z(q_j)\mathbf{T}_x(a_j)\mathbf{T}_{r_x}(\alpha_j)
rota alrededor de \(z\)
se traslada sobre \(z\)
¿Cinemática directa?
{^B}\mathbf{T}_E(\mathbf{q})=\displaystyle\prod_{j=1}^{n}\mathbf{A}_j(q_j)=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)\cdots\mathbf{A}_n(q_n)
para cualquier manipulador serial
Ejemplo: manipulador planar
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & 0 \\
\end{array}
{^B}\mathbf{T}_E(\mathbf{q})=\mathbf{A}_1(q_1)\mathbf{A}_2(q_2)
R
R
manipulador RR
\mathbf{A}_1(q_1)=\mathbf{T}_{r_z}(q_1)\mathbf{T}_z(0)\mathbf{T}_x(a_1)\mathbf{T}_{r_x}(0)
=\begin{bmatrix} \cos(q_1) & -\sin(q_1) & 0 & 0 \\ \sin(q_1) & \cos(q_1) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & a_1 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\mathbf{A}_2(q_2)=\mathbf{T}_{r_z}(q_2)\mathbf{T}_z(0)\mathbf{T}_x(a_2)\mathbf{T}_{r_x}(0)
=\begin{bmatrix} \cos(q_2) & -\sin(q_2) & 0 & 0 \\ \sin(q_2) & \cos(q_2) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & a_2 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\mathbf{A}_1(q_1)=\mathbf{T}_{r_z}(q_1)\mathbf{T}_z(0)\mathbf{T}_x(a_1)\mathbf{T}_{r_x}(0)
=\begin{bmatrix} \cos(q_1) & -\sin(q_1) & 0 & 0 \\ \sin(q_1) & \cos(q_1) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & a_1 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\mathbf{A}_2(q_2)=\mathbf{T}_{r_z}(q_2)\mathbf{T}_z(0)\mathbf{T}_x(a_2)\mathbf{T}_{r_x}(0)
=\begin{bmatrix} \cos(q_2) & -\sin(q_2) & 0 & 0 \\ \sin(q_2) & \cos(q_2) & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & a_2 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
{^B}\mathbf{T}_E(\mathbf{q})=\begin{bmatrix} \cos(q_1+q_2) & -\sin(q_1+q_2) & 0 & a_2\cos(q_1+q_2)+a_1\cos(q_1) \\ \sin(q_1+q_2) & \cos(q_1+q_2) & 0 & a_2\sin(q_1+q_2)+a_1\sin(q_1) \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}

Ejemplo: robot SCARA
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & \pi \\ \hline
0 & q_3 & 0 & 0 \\ \hline
q_4 & d_4 & 0 & 0 \\
\end{array}
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & \pi \\ \hline
0 & q_3 & 0 & 0 \\ \hline
q_4 & d_4 & 0 & 0 \\
\end{array}
manipulador RRPR
R
R
P
R
parámetros DH
\begin{array}{c|c|c|c}
\theta_j & d_j & a_j & \alpha_j \\ \hline
q_1 & 0 & a_1 & 0 \\ \hline
q_2 & 0 & a_2 & \pi \\ \hline
0 & q_3 & 0 & 0 \\ \hline
q_4 & d_4 & 0 & 0 \\
\end{array}
manipulador RRPR
R
R
P
R
¿Cálculos tediosos? MATLAB
>> mt3005_clase5_manipuladores.mlx
Algunos últimos detalles


\{B\}
\{E\}
\{I\}
\{I\}
\{F\}
{^I}\mathbf{T}_{B}
{^E}\mathbf{T}_{F}
Transformaciones de base y herramienta
\mathcal{K}(\mathbf{q})\subseteq {^B}\mathbf{T}_E(\mathbf{q})
{^I}\mathbf{T}_B
{^E}\mathbf{T}_F
={^I}\mathbf{T}_F\left(\mathbf{q}\right)
transformación de base
transformación de herramienta
La especificación URDF
MT3005 - Lecture 5 (2025)
By Miguel Enrique Zea Arenales



