IE3036 - Sistemas de Control 1
2do ciclo, 2024
Lección 15: Implementación de sistemas discretos
Ya con \(C(z)\),
¿Cómo la implementamos?
Condiciones iniciales iguales a cero.
condiciones iniciales iguales a cero
Ecuaciones de diferencias
Ecuaciones diferenciales
Ejemplo
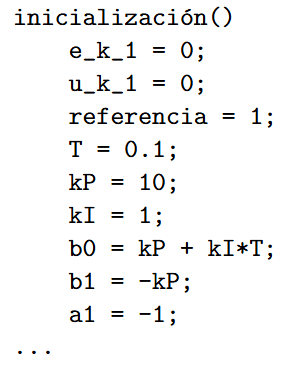
Para el siguiente caso, ¿cuál es el seudo-código que implementa un control PI discretizado por Backward Euler si la referencia es el escalón unitario? Para el código asuma \(T=0.1\ s\), \(k_P=10\) y \(k_I=1\).
Ejemplo
Para un controlador PI continuo:
Backward Euler: \(s=\frac{z-1}{Tz}\)
Controlador discretizado:
Por lo que: \(b_0=k_P+k_IT, b_1=-k_P, a_1=-1 \)
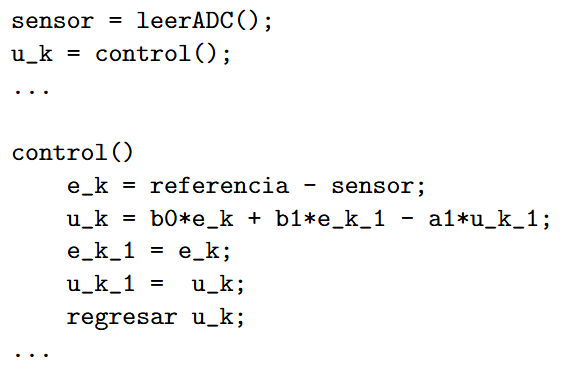
Ecuación de diferencias:
No se especifican condiciones iniciales, por lo que las asumimos iguales a cero.
Ejemplo
La referencia también podría ser una señal muestreada.
Seleccionando el período de muestreo
A diferencia de procesamiento digital de señales, la selección de un \(T\) adecuado no tiene una solución concreta. ¿Por qué?
A diferencia de procesamiento digital de señales, la selección de un \(T\) adecuado no tiene una solución concreta. ¿Por qué?
Porque estamos lidiando con más señales que sólo la entrada y salida del sistema.
- referencia
- salida del sensor
- salida del control
- salida de la planta
- perturbación
A diferencia de procesamiento digital de señales, la selección de un \(T\) adecuado no tiene una solución concreta. ¿Por qué?
Porque estamos lidiando con más señales que sólo la entrada y salida del sistema.
- referencia
- salida del sensor
- salida del control
- salida de la planta
- perturbación
¿A cuál le aplicamos el criterio de Nyquist?
A diferencia de procesamiento digital de señales, la selección de un \(T\) adecuado no tiene una solución concreta. ¿Por qué?
Porque estamos lidiando con más señales que sólo la entrada y salida del sistema.
- referencia
- salida del sensor
- salida del control
- salida de la planta
- perturbación
¿A cuál le aplicamos el criterio de Nyquist?
Por esta ambigüedad se recomienda emplear un \(T\) tan pequeño como lo permita el dispositivo de cómputo (siempre y cuando este sea razonable).
A diferencia de procesamiento digital de señales, la selección de un \(T\) adecuado no tiene una solución concreta. ¿Por qué?
Porque estamos lidiando con más señales que sólo la entrada y salida del sistema.
- referencia
- salida del sensor
- salida del control
- salida de la planta
- perturbación
¿A cuál le aplicamos el criterio de Nyquist?
Por esta ambigüedad se recomienda emplear un \(T\) tan pequeño como lo permita el dispositivo de cómputo (siempre y cuando este sea razonable).
O bien, emplear las siguientes rules of thumb:
Constante de tiempo del polo más dominante del sistema.
Addendum: simulaciones
Pueden emplearse las ecuaciones de diferencias no sólo para implementar controladores digitales sino también para efectuar simulaciones de sistemas LTI en cualquier lenguaje de programación.
Pueden emplearse las ecuaciones de diferencias no sólo para implementar controladores digitales sino también para efectuar simulaciones de sistemas LTI en cualquier lenguaje de programación.
Esto es lo que hace MATLAB en la Control Systems Toolbox.
Ejemplo
Escriba un script de MATLAB que permita simular el siguiente sistema mecánico, sujeto a una fuerza constante unitaria en un intervalo de simulación de 0 a 25 segundos. \(T=0.1 \ s\).
>> clase15_ej_simulacion.m